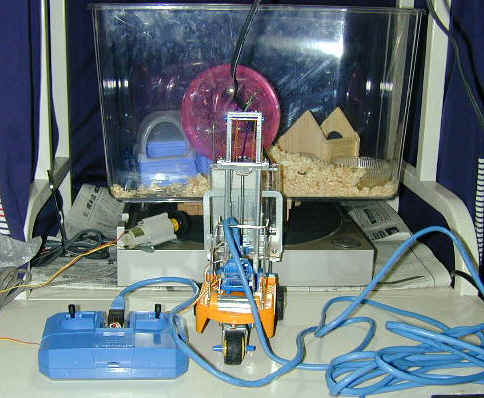
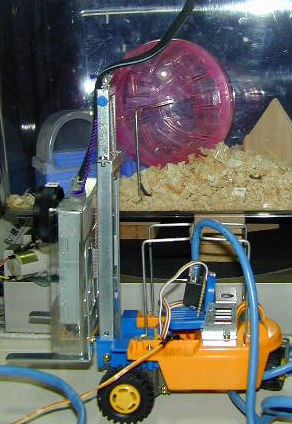
第一次実験ではフォークリフトキットをそのまま使った撮影にチャレンジしましたが、色々と改善しなければならない点があります。
リモコンシステムV2以降での課題は以下の通り。
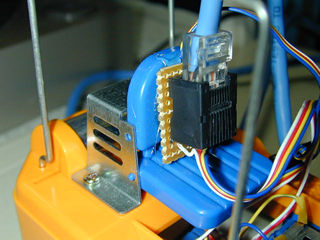
1.リモコンケーブルの変更
現在のリモコンはケーブル長が1m程度しかないためケースの近くまで行ってコントロールする必要があります。
このケーブルを10Base-T用のケーブル(8芯)と交換して最大10mまで延長する予定です。
ケーブルの抵抗で10m延長が無理そうな場合はカメラ制御側にリレーを噛ませて制御する予定です。
拡張性を考慮すると10Base-T用のコネクタをリモコン側、ギアボックス側に用意してそれぞれに配線するのが良いのですが、このコネクタが1個1000円近くするので却下だろうな〜(^^;
300円ならやるけど。
2.カメラの前後移動
カメラの前進後退はフォークリフトの駆動部を使わずにもう少しスムーズに動くものに交換する予定です。 今のところスライドレールに載せてベルトにより前進/後退させることを考えています。
フォークリフトのアップダウン部分の機構部分を水平方向に使えば前後の移動が実現できそうです。
3.カメラの左右振り
カメラの左右回転には減速比の大きなギアを使う予定ですが、このままフォークリフトの駆動部を使っても良いような気もします。(適当に抵抗を入れて減速)
4.カメラのアップダウン
カメラのアップダウンはこのままフォークリフトのものを使う予定。
当初カメラの仰角俯角制御のためにもギアを入れた方が良いかと思ったのですが、カメラの高さと仰角俯角は比例しているため、ひもを使った単純な制御方法で済みそうです。
5.ターンテーブルの回転
回転はギアボックスに取り付けたゴムタイヤでターンテーブル部分に回転を伝えます。
ケースが乗った状態のターンテーブルを回転させるためにはかなり大きな回転トルクが必要と予想されるため減速比率の高い高トルク型ギアボックスを使う予定です。
ゴムタイヤを使った間接的回転制御なので回転停止時にギアにかかる負荷はタイヤの滑りで吸収できそうです。




 カメラの仰角/俯角制御
カメラの仰角/俯角制御